Spread the love
Если вы хотите собрать или находитесь в процессе создания собственного станка с ЧПУ, то, скорее всего, вы встретите термин GRBL. Итак, в этом руководстве мы узнаем, что такое GRBL, как установить и как использовать его для управления вашим станком с ЧПУ на базе Arduino.
Кроме того, мы узнаем, как использовать Universal G-code Sender, популярное программное обеспечение контроллера GRBL с открытым исходным кодом.
Что такое GRBL?
GRBL — это программное обеспечение или прошивка с открытым исходным кодом, которая позволяет управлять движением для станков с ЧПУ. Мы можем легко установить прошивку GRBL на Arduino и сразу же получить недорогой высокопроизводительный контроллер ЧПУ. GRBL использует G-код в качестве ввода и выводит управление движением через Arduino.
Для лучшего понимания мы можем взглянуть на следующую схему:
GRBL и Arduino принцип работы ЧПУ станка
Из схемы мы можем видеть место GRBL в принципе работы станка с ЧПУ. Это прошивка, которую нам нужно установить или загрузить в Arduino, чтобы она могла управлять шаговыми двигателями станка с ЧПУ. Другими словами, функция прошивки GRBL заключается в переводе G-кода в движение двигателя.
Особенности изготовления
Арсенал инструментов домашних мастеров отличается огромным многообразием
Особенное внимание уделено фрезерному станку. Это устройство представляет собой оборудование, позволяющее выполнять множество операций по металлу, по дереву, по пластмассе и иным материалам
Размеры, мощность и набор функций фрезерных приборов могут различаться, но в основу каждого станка заложен стандартный принцип: неподвижно закреплённая заготовка, обрабатывается фрезой – специальным режущим инструментом с зубьями (режущими лезвиями).
Имея в наличии все необходимые инструменты и материалы, умельцы в своих мастерских без труда и в короткие сроки соберут компактное устройство – самодельный фрезер. Из всех существующих видов фрезеров в домашних мастерских наибольшей популярностью пользуется вертикальный фрезерный станок. Этот инструмент имеет очень простую схему, и для его сборки используются недорогие материалы. Однако вид станка определяют задачи, которые необходимо выполнять мастеру. Существуют следующие виды фрезерного оборудования:
- горизонтально расположенный инструмент;
- вертикальный прибор;
- копировальное с пантографом устройство.
Кроме того, следует продумать размеры и расположение станка – напольный или настольный вариант.
Обладатели любого фрезерного станка могут выполнять качественную обработку заготовок и изделий из металла и дерева. В промышленности фрезерные станки относятся к многофункциональным агрегатам. Самодельные конструкции наделены достаточным количеством операций, с помощью которых доступна качественная отделка, поэтому их также можно считать многофункциональными.
Требуемое оборудование
- Arduino — Как мы уже говорили, нам понадобится Arduino для установки GRBL. В частности, нам нужна плата Arduino на базе Atmega 328, а это означает, что мы можем использовать либо Arduino UNO, либо Nano.
- Шаговые двигатели. Очевидно, что шаговые двигатели обеспечивают движение машины.
- Драйверы — для управления шаговыми двигателями нам нужны драйверы, и распространенный выбор, когда дело доходит до небольших станков с ЧПУ DIY (использующих шаговые двигатели NEMA 14 или 17), — это драйверы A4988 или DRV8825.
- Arduino CNC Shield — для подключения шаговых драйверов к Arduino самый простой способ — использовать Arduino CNC Shield. Он использует все контакты Arduino и обеспечивает простой способ подключения всего, шаговых двигателей, шпинделя / лазера, концевых выключателей, охлаждающего вентилятора и т. д.
Обратите внимание, что это только основные электронные компоненты, которые нам нужны, чтобы понять, как работает станок с ЧПУ.
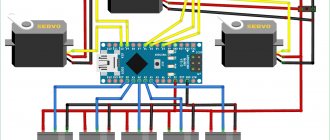
В качестве примера того, как все должно быть соединено, мы можем взглянуть на одну из машин для резки пенопласта с ЧПУ сделанную своими руками.
Схема сборки станка с ЧПУ GRBL
Здесь вы можете проверить и получить основные электронные компоненты, необходимые для сборки этого станка с ЧПУ:
- Шаговый двигатель — NEMA 17
- Шаговый драйвер A4988
- Arduino CNC Shield
- Arduino Uno
Главный инструмент этого станка с ЧПУ — это горячая проволока, которая может легко расплавить или прорезать пенополистирол и придать любую форму, которую мы хотим.
Ось Y
Ось имеет форму портала, жестко зафиксирована к основанию станка. Имеет ту же конструкцию, что ось Х (шпилька и два направляющих вала).
Как установить GRBL
Во-первых, чтобы иметь возможность установить или загрузить GRBL в Arduino, нам понадобится Arduino IDE .
Затем мы можем скачать прошивку GRBL с github.com.
Загрузите файл .ZIP и выполните следующие действия:
- Откройте файл grbl-master.zip и извлеките файлы
- Откройте IDE Arduino, перейдите в Sketch> Включить библиотеку> Добавить библиотеку .ZIP…
Добавление GRBL прошивки в IDE Arduino
Перейдите в извлеченную папку «grbl-master», в ней выберите папку «grbl» и щелкните открытый файл. Теперь нам нужно использовать GRBL как библиотеку Arduino.
- Затем перейдите в Файл> Примеры> grbl> grblUpload. Откроется новый скетч, и нам нужно загрузить его на плату Arduino. Код может выглядеть странно, так как это всего лишь одна строка, но не беспокойтесь, все происходит в фоновом режиме в библиотеке. Итак, нам просто нужно выбрать плату Arduino, COM-порт и нажать эту кнопку загрузки, и все готово.
Конфигурация GRBL
На этом этапе мы должны настроить GRBL для нашей машины. Мы можем сделать это через Serial Monitor IDE Arduino. Как только мы откроем Serial Monitor, мы получим сообщение типа «Grbl 1.1h [‘$’ for help]». Если вы не видите это сообщение, убедитесь, что вы изменили скорость передачи данных на 115200.
Если мы введем «$$», мы получим список команд или текущих настроек, и они будут выглядеть примерно так:
$100 = 250 000 (x, шаг / мм) $101 = 250 000 (y, шаг / мм) $102 = 3200 000 (z, шаг / мм) $110 = 500.000 (x макс. Скорость, мм / мин) $111 = 500.000 (y макс. Скорость, мм / мин) $ 112 = 500.000 (макс. скорость z, мм / мин) $ 120 = 10.000 (ускорение x, мм / сек ^ 2) $ 121 = 10.000 (ускорение y, мм / сек ^ 2) $ 122 = 10.000 (ускорение z, мм / сек ^ 2)
Все эти команды могут или должны быть настроены в соответствии с нашим станком с ЧПУ. Например, с первой командой, $100 = 250,000 (x, шаг / мм), мы можем отрегулировать шаги на мм машины, или мы можем указать, сколько шагов должен сделать двигатель, чтобы наша ось X сместилась на 1 мм.
Однако я бы посоветовал оставить эти настройки как есть. Есть более простой способ настроить их в соответствии с нашей машиной с помощью программного обеспечения контроллера, который мы объясним в следующем разделе.
Ось Z
Эта ось заметно короче, чем X и Y. Ей не нужны большие ходы т.к. она обеспечивает только ход инструмента. Обычно, фрезеруемые детали не бывают очень высокими. По тому ограничимся 15-ю см
Контроллер GRBL
Итак, после того, как мы установили прошивку GRBL, теперь наш Arduino знает, как читать G-код и как управлять станком с ЧПУ в соответствии с ним. Однако, чтобы отправить G-код на Arduino, нам нужен какой-то интерфейс или программное обеспечение контроллера, которое сообщит Arduino, что делать. На самом деле для этого существует множество программ как с открытым кодом, так и коммерческих, подробно о них вы можете узнать из нашей статьи. Конечно, мы будем придерживаться открытого исходного кода, поэтому в качестве примера мы будем использовать Univarsal G-code Sender.
Интерфейс Univarsal G-code Sender
Основание для ЧПУ плоттера
Основание нашего плоттера – это база, к которой прикрепляются все элементы конструкции чтобы устройство получилось жестким и в то же время портативным. Для основания нашего плоттера мы использовали алюминиевый лист поскольку он легкий, прочный, его легко сгинать и резать, а еще он не ржавеет (вдруг ваши внуки через много-много лет будут рисовать на этом плоттере).
Дизайн и размеры основания показаны на следующем рисунке (все размеры указаны в мм):
После проведения необходимых операций сгинания и обрезания у нас получилась следующая конструкция:
Как использовать универсальный отправитель G-кода
В этом примере я буду использовать версию платформы 2.0. После загрузки нам нужно извлечь zip-файл, перейти в папку «bin» и открыть любой из исполняемых файлов «ugsplatfrom». На самом деле это программа JAVA, поэтому для запуска этой программы сначала необходимо установить среду выполнения JAVA .
Как только мы откроем универсальный отправитель G-кода, сначала нам нужно настроить машину и настроить параметры GRBL, показанные ранее. Для этой цели мы воспользуемся мастером настройки UGS, который намного удобнее, чем вводить команды вручную через Serial Monitor IDE Arduino.
Выбор скорости передачи GRBL
Первый шаг здесь — выбрать скорость передачи, которая должна быть 115200, и порт, к которому подключен наш Arduino. Как только мы подключим Univarsal G-code Sender к Arduino, на следующем шаге мы сможем проверить направление движения двигателей.
Направление движения двигателей UGS
При необходимости мы можем изменить направление с помощью мастера или вручную переключить соединение двигателя на Arduino CNC Shield.
На следующем шаге мы можем настроить параметр шагов / мм, о котором мы упоминали ранее. Здесь гораздо проще понять, как его настроить, потому что мастер настройки вычислит и сообщит нам, до какого значения мы должны обновить параметр.
Значение по умолчанию — 250 шагов / мм. Это означает, что если мы нажмем кнопку перемещения «x +», двигатель сделает 250 шагов. Теперь, в зависимости от количества физических шагов двигателя, выбранного шагового разрешения и типа передачи, машина будет перемещаться на некоторое расстояние. Используя линейку, мы можем измерить фактическое перемещение машины и ввести это значение в поле «Фактическое перемещение». На основании этого мастер рассчитает и сообщит нам, на какое значение следует изменить параметр шаги / мм.
В моем случае станок сдвинулся на 3 мм. В соответствии с этим мастер предложил обновить параметр шаги / мм до значения 83.
GRBL калибровка шагов
После обновления этого значения станок теперь движется правильно, 1 мм в программном обеспечении означает 1 мм для станка с ЧПУ.
Консоль UGS
В консоли UGS, когда мы выполняем каждое действие, мы можем видеть выполняемые команды. Мы можем заметить, что, обновив параметр steps / mm, программа UGS фактически отправила в Arduino или прошивку GRBL команду, о которой мы упоминали ранее. Это было значение по умолчанию: $100 = 250 000 (x, шаг / мм), и теперь мы обновили значение до 83 шагов на мм: $100 = 83.
На следующем этапе мы можем включить концевые выключатели и проверить, правильно ли они работают.
Включение коцевиков
В зависимости от того, являются ли они нормально разомкнутым или нормально замкнутым соединением, мы также можем инвертировать их здесь.
Здесь стоит отметить, что иногда нам нужно отключить концевой выключатель оси Z. Так было сj станком для резки пенопласта с ЧПУ, где мне не нужен был концевой выключатель оси Z, и мне пришлось отключить его, чтобы иметь возможность правильно разместить станок. Итак, для этого нам нужно отредактировать файл config.h, который находится в папке библиотеки Arduino (или Documents \ Arduino \ libraries).
Файл config.h
Здесь нам нужно найти линии цикла возврата в исходное положение и прокомментировать установку по умолчанию для 3-х осевого станка с ЧПУ и раскомментировать настройку для 2-х осевых станков. Чтобы изменения вступили в силу, нам нужно сохранить файл и повторно загрузить эскиз grblUpload на нашу плату Arduino.
Тем не менее, на следующем шаге мы можем либо включить, либо отключить возвращение в исходное положение фрезерной обработки с ЧПУ.
Возврат в исходное положение
Используя кнопку «Возврат в исходное положение», машина начнет движение к концевым выключателям. Если все пойдет наоборот, мы можем легко изменить направление.
Наконец, на последнем шаге мастера настройки мы можем включить мягкие ограничения для нашего станка с ЧПУ.
Ограничения станка с ЧПУ в UGS
Мягкие ограничения не позволяют машине выходить за пределы установленной рабочей зоны.
Сборка некоторых важных узлов станка
В станке, который вы начали собирать собственноручно, надо предусмотреть ряд ответственных узлов, обеспечивающих вертикальное перемещение рабочего инструмента. В этом перечне:
- винтовая передача – вращение передаётся, используя зубчатый ремень. Он хорош тем, что не проскальзывают на шкивах, равномерно передавая усилия на вал фрезерного оборудования;
- если используют шаговый двигатель (ШД) для мини-станка, желательно брать каретку от более габаритной модели принтера – помощнее; старые матричные печатные устройства имели достаточно мощные электродвигатели;
- для трёхкоординатного устройства, понадобится три ШД. Хорошо, если в каждом найдётся 5 проводов управления, функционал мини-станка возрастёт. Стоит оценить величину параметров: напряжения питания, сопротивления обмотки и угла поворота ШД за один шаг. Для подключения каждого ШД нужен отдельный контроллер;
- с помощью винтов, вращательное движение от ШД преобразуется в линейное. Для достижения высокой точности, многие считают нужным иметь шарико-винтовые пары (ШВП), но это комплектующая не из дешевых. Подбирая для монтажа блоков набор гаек и крепежных винтов, выбирают их со вставками из пластика, это уменьшает трение и исключает люфты;
вместо двигателя шагового типа, можно взять обычный электромотор, после небольшой доработки; вертикальная ось, которая обеспечивает перемещение инструмента в 3D, охвачивая весь координатный стол. Её изготовляют из алюминиевой плиты
Важно, чтобы размеры оси были подогнаны к габаритам устройства. При наличии муфельной печи, ось можно отлить по размерам чертежей.
Ниже – чертёж, сделанный в трёх проекциях: вид сбоку, сзади, и сверху.