Рука манипулятор — это потрясающее устройство! Во всем мире их используют заводы, они красят, припаивают и перемещают вещи. Их также можно увидеть в космических исследованиях, подводных машинах и даже в медицинских целях!
И теперь у Вас есть возможность собрать дешёвую версию в вашем собственном доме, офисе или лаборатории! Устали делать повторяющуюся работу? Программируйте свой манипулятор, чтобы манипулятор решал за Вас эти задачи….
В этом уроке мы покажем Вам, как собрать роботизированную руку и как ее запрограммировать с помощью Arduino Mega. Для этого проекта мы также испытаем другой метод управления манипулятором: используя контроллеры — Nintendo Nunchuk! Они дешевы, легкие в поиске и имеют множество датчиков.
Существует несколько способов использования этого урока. Если у вас нет набора для манипулятора (и Вы не хотите его покупать или создавать), Вы все равно можете прочитать урок, чтобы узнать что-то о программировании Arduino и о том, как связать контроллер Wii Nunchuk с Вашими собственными проектами. Урок так же поможет, в практике навыков сборки электроники.
Характеристики
Технические характеристики бортового ГАЗ-53, на который обычно устанавливается манипулятор:
Автомобили ГАЗ-53 комплектовались шинами 8,25-R20. Вместимость бензобака составляет 90 литров. Задняя и передняя подвески – зависимые рессорные, на передней также установлены телескопические амортизаторы. Автоманипулятор ГАЗ-53 на обеих осях оснащен тормозами барабанного типа. Благодаря отсутствию гидроусиления рулевого управления процесс вождения данной техники превращается в физически непростое занятие.
В течение производственного цикла на автомобили ГАЗ-53 устанавливались различные двигатели, мощность которых влияла на грузоподъемность машины.
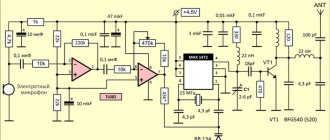
Электроника
Чтобы заставить руку работать достаточно всего навсего подключить пять сервоприводов к Arduino и подать на них питание с хорошего источника. У uArm использованы какие-то двигатели с обратной связью. Я поставил три обычных двигателя MG995 и два маленьких двигателя с металлическим редуктором для управления захватом.
Тут мое повествование тесно сплетается с предыдущими проектами. С некоторых пор я начал преподавать программирование Arduino и для этих целей даже подготовил свою Arduino-совместимую плату. С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже писал). В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.
Этот шилд на самом деле очень простой. На нем четыре переменных резистора, две кнопки, пять разъемов для сервопривода и разъем питания. Это очень удобно с точки зрения отладки. Можно загрузить тестовый скетч и записать какой-нибудь макрос для управления или что-нибудь вроде того. Ссылку для скачивания файла платы я тоже дам в конце статьи, но она подготовлена для изготовления с металлизацией отверстий, так что мало пригодна для домашнего производства.
Мини-кран своими руками: обзор вариантов
При строительстве дома из газобетона, бруса, кирпича и т.д. часто возникает необходимость в подъёме груза. Например, нужно «закинуть» блоки или деревянные балки на второй этаж, поднять мешки с цементом или залить армопояс. Делать это вручную, даже с привлечением помощников, не так легко — здоровье дороже. Нанимать автокран или манипулятор на небольшой объём работ — дорого. Выход — использовать мини-кран, который, для удешевления строительства, сделан своими руками.
- Как сделать подъёмник для кладки газобетона.
- Какие детали и инструменты нужны для строительства мини-крана.
- Как сократить затраты на строительство универсального подъёмника.
Особенности манипулятора
До появления uArm, настольные манипуляторы подобного класса выглядели достаточно уныло. У них либо не было электроники вообще, либо было какое-нибудь управление с резисторами, либо было свое проприетарное ПО. Во-вторых, они как правило не имели системы параллельных шарниров и сам захват менял свое положение в процессе работы. Если собрать все достоинства моего манипулятора, то получается достаточно длинный список:
- Система тяг, позволяющих разместить мощные я тяжелые двигатели в основании манипулятора, а также удерживающие захват параллельно или перпендикулярно основанию
- Простой набор комплектующих, которые легко купить или вырезать из оргстекла
- Подшипники почти во всех узлах манипулятора
- Простота сборки. Это оказалось действительно сложной задачей. Особенно трудно было продумать процесс сборки основания
- Положение захвата можно менять на 90 градусов
- Открытые исходники и документация. Все подготовлено в доступных форматах. Я дам ссылки для скачивания на 3D-модели, файлы для резки, список материалов, электронику и софт
- Arduino-совместимость. Есть много противников Arduino, но я считаю, что это возможность расширения аудитории. Профессионалы вполне могут написать свой софт на C — это же обычный контроллер от Atmel!
Механика
Для сборки необходимо вырезать детали из оргстекла толщиной 5мм:
… и 3мм:
С меня за резку всех этих деталей взяли около $10.
Основание монтируется на большом подшипнике:
Особенно трудно было продумать основание с точки зрения процесса сборки, но я подглядывал за инженерами из uArm. Качалки сидят на штифте диаметром 6мм. Надо отметить, что тяга локтя у меня держится на П-образном держателе, а у uFactory на Г-образном. Трудно объяснить в чем разница, но я считаю у меня получилось лучше.
Захват собирается отдельно. Он может поворачиваться вокруг своей оси. Сама клешня сидит прямо на валу двигателя:
В конце статьи я дам ссылку на суперподробную инструкцию по сборке в фотографиях. За пару часов можно уверенно все это скрутить, если все необходимое есть под рукой. Также я подготовил 3D-модель в бесплатной программе SketchUp. Её можно скачать, покрутить и посмотреть что и как собрано.
Популярные модели
Краны-манипуляторы производятся в:
Выбрать модель силовой установки можно из таких торговых марок ведущих мировых производителей:
Установки Foton имеют показатель грузоподъемности 6 т, а их длина — больше 6 м. Foton Олли перевозит грузы и полезен в строительных работах.
Крановая установка Isuzu QL 1100 TMA является одной из новинок японской компании. Грузоподъемность — 5,5 т, длина около 6 м.
Кран-манипулятор Hiab 600EP5HiPro поднимает грузы до 16 т. Его можно использовать для перемещения крупно- и негабаритных грузов. Оснащен пультом для дистанционного управления. Данное устройство способно поднимать грузы, которые расположены возле его колес.
Мини-кран перемещает груз весом до 3 т. Популярные модели :
Подходящая крановая установка на Газель должна поднимать вес 800 кг. Это такие модели:
Программирование
Самое интересное, это управление манипулятором с компьютера. У uArm есть удобное приложение для управления манипулятором и протокол для работы с ним. Компьютер отправляет в COM-порт 11 байт. Первый из них всегда 0xFF, второй 0xAA и некоторые из оставшихся — сигналы для сервоприводов. Далее эти данные нормализуются и отдаются на отработку двигателям. У меня сервоприводы подключены к цифровым входам/выходам 9-12, но это легко можно поменять.
Терминальная программа от uArm позволяет изменять пять параметров при управлении мышью. При движении мыши по поверхности изменяется положение манипулятора в плоскости XY. Вращение колесика — изменение высоты. ЛКМ/ПКМ — сжать/разжать клешню. ПКМ + колесико — поворот захвата. На самом деле очень удобно. При желании можно написать любой терминальный софт, который будет общаться с манипулятором по такому же протоколу.
Я не буду здесь приводить скетчи — скачать их можно будет в конце статьи.
Устанавливаем сенсоры на перчатке
Можем приступать к установке датчиков и нашей монтажной платы на саму перчатку. Сначала просверлите небольшое отверстие в пластике датчиков. Отверстия сверлятся в местах, где чувствительный элемент закончился. ВАЖНО! Ни в коем случае не сверлите отверстие в чувствительном материале. После этого оденьте перчатку. Сделайте отметки карандашом или ручкой на вершине каждого сустава. Эти места вы будете использовать для крепежа сенсоров. Датчики изгиба крепятся обычной ниткой. Пришейте сенсоры к перчатке. Используйте отверстие, которые вы сделали на концах датчика. В местах, где отмечены суставы сенсоры «прихватываются» нитью поверх. Более детально все это показано на фото ниже. Монтажная плата пришивается к перчатке аналогично сенсорам. Учтите, что для движения пальцев надо оставить определенный запас длины проводников. Это надо учесть при установке нашей монтажной платы и выборе длины коннекторов от нее к датчикам.
Популярные модели
Краны-манипуляторы производятся в:
Выбрать модель силовой установки можно из таких торговых марок ведущих мировых производителей:
Установки Foton имеют показатель грузоподъемности 6 т, а их длина — больше 6 м. Foton Олли перевозит грузы и полезен в строительных работах.
Крановая установка Isuzu QL 1100 TMA является одной из новинок японской компании. Грузоподъемность — 5,5 т, длина около 6 м.
Кран-манипулятор Hiab 600EP5HiPro поднимает грузы до 16 т. Его можно использовать для перемещения крупно- и негабаритных грузов. Оснащен пультом для дистанционного управления. Данное устройство способно поднимать грузы, которые расположены возле его колес.
Мини-кран перемещает груз весом до 3 т. Популярные модели :
Подходящая крановая установка на Газель должна поднимать вес 800 кг. Это такие модели:
Газель с КМУ подходит для транспортировки крупногабаритных и легких грузов, а также для погрузочно-разгрузочных работ.
Сборка конструкции своими руками
Чтобы после первого же применения стрела не деформировалась и не потребовалось разобрать всю конструкцию, к вопросу самостоятельного изготовления нужно подойти максимально ответственно.
Фактически работа подразумевает выполнение 2 этапов.
- Подготовка прицепа. Для начала придется подготовить сам прицеп. Ведь установить кран непосредственно на платформу, особенно когда пол выполнен из фанеры, не получится. Кран займет полезное пространство и не обеспечит нужную эффективность. Потому лучше делать узел за пределами бортов или грузовой платформы. Подготовив площадку для крана, далее наступит следующий этап;
- Изготовление крана и его установка. Собрать кран можно из подручных материалов, но лучше использовать качественные компоненты с нужными параметрами прочности и устойчивости к износу в ходе эксплуатации. Об этом расскажу чуть позже.
Теперь по каждому этапу пройдемся отдельно.
Скажу сразу, что это лишь пример, который вы можете использовать в качестве основы или повторять его с абсолютной точностью. У всех разные прицепы и различные возможности, как и задачи, стоящие перед подобной конструкцией.
Подготовка прицепа
Никто не запрещает вам использовать готовые чертежи из сети. Только предварительно убедитесь, что они правильные, выполнены грамотно и соответствуют реальным характеристикам получаемого крана. Плюс не забывайте, что в некоторых случаях правильнее и проще установить лебедку для прицепа , а не монтировать самодельный манипулятор.
Возможно, кому-то потребуется дополнительно люлька, либо стрела увеличенного размера. Все индивидуально, но в качестве примера одну конструкцию описать стоит. Подкрепить полученные знания всегда можно с помощью фото и видео инструкций, представленных в сети.
Перед тем как сделать сам кран, займемся подготовкой автоприцепа. Суть подготовительных мероприятий заключается в следующем:
- подготовить материалы для изготовления конструкции;
- сделать выдвижные подставки из профильной трубы и металлических пластин;
- тем самым автоприцеп будет более устойчивым;
- на основе профильной трубы выполнить прямоугольную раму для монтажа самого крана;
- прикрепить ее к перекладине подрамника;
- внутри одной из труб подставки зафиксировать выдвижную ножку;
- с помощью листового металла вырезать площадку требуемого размера;
- приварить к листу металла отрезок трубы;
- ребрами жесткости дополнительно соединить трубу с площадкой под кран.
Что касается материалов, то профильную трубу лучше брать с сечением около 50×50 мм. Листовой металл не должен быть по толщине менее 5 мм. Отрезок трубы для основания под кран берется в районе 90 мм в диаметре. Длина произвольная, но не менее 300 мм.
Подъемное устройство
Теперь у вас в распоряжении есть прицеп, на котором присутствует специальная подставка и основание для будущего крана-манипулятора. Где именно и с какой стороны делать площадку, решайте сами. Тут есть разные варианты.
Что же касается подъемного устройства, то здесь работа предусматривает выполнение следующих операций:
- из трубы диаметров около 80 мм делается стойка;
- с одного конца стойки параллельно фиксируются две металлические пластины;
- ко второму концу приваривается основание, подготовленное на прицепе;
- внутри основания можно засыпать шарики от подшипников, смазав их маслом;
- тем самым стойка будет свободно вращаться во время работы;
- между пластиками стойки монтируется стрела с помощью болтового соединения;
- стрелу можно сделать из труб с сечением 60×60 и 50×50 мм;
- чтобы стрела регулировалась по наклону и вылету, в трубах и пластинах необходимо высверлить отверстия;
- в них вставляются стороны;
- к стреле далее вваривается ручная лебедка.
Подобный кран теперь осталось только болтами закрепить на прицепе. Сварным методом соединять манипулятор с прицепом не стоит, поскольку вряд ли сотрудники ГИБДД похвалят вас за выезд на дорогу общего пользования с подобным самодельным творением.
Это лишь пример того, как можно собственными силами превратить обычный прицеп в более функциональное прицепное транспортное средство. Далее выбор за вами.
Делитесь своими мыслями и идеями на этот счет. Если знаете, как усовершенствовать конструкцию, жду ваших комментариев.